Hydra-UW3 로봇암(Robot Arm) 사양(Specification)
| INDEX | Specification |
|---|---|
| 자유도(Degree of Freedom) | 6+1 (with end-effector) |
| 가반하중(Payload) | 120 kgf (@ 210 bar) |
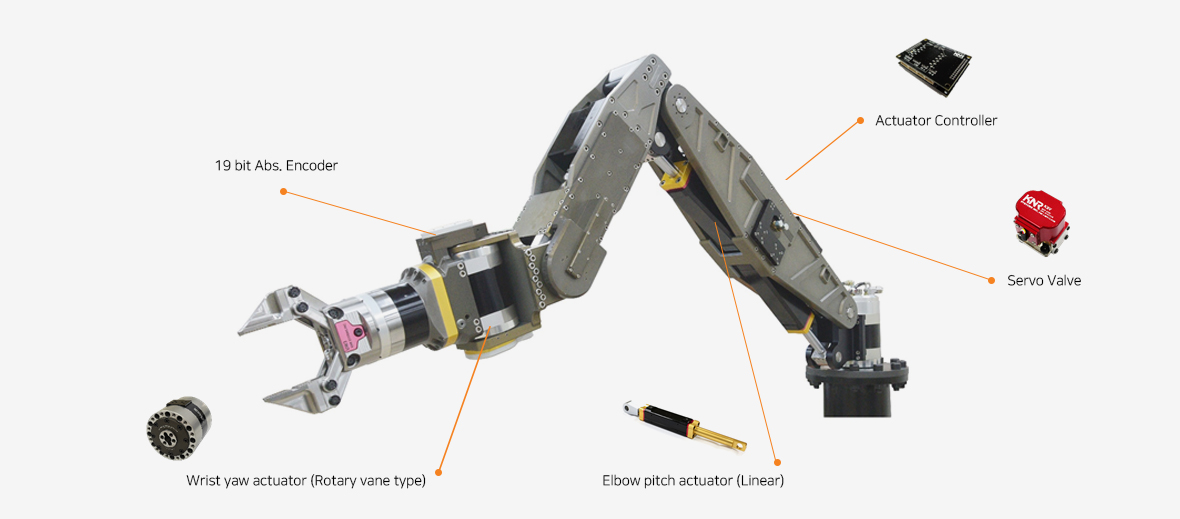
| 구동부(Actuator type) | 선형 및 회전형 유압액추에이터 (Linear / Rotary Acutator) |
| 무게(Weight) | 130 kg |
| 센서부(Sensor) | 19 비트 절대엔코더 (19 bit Abs. Encoder) |