
Hydra-UW3 로봇팔 작업영역(Workspace)
- 설계사양 : 최대 4 km/h (고객 요구에 따라 변경 가능)
- 적재중량 : (고객 요구에 따라 변경 가능)
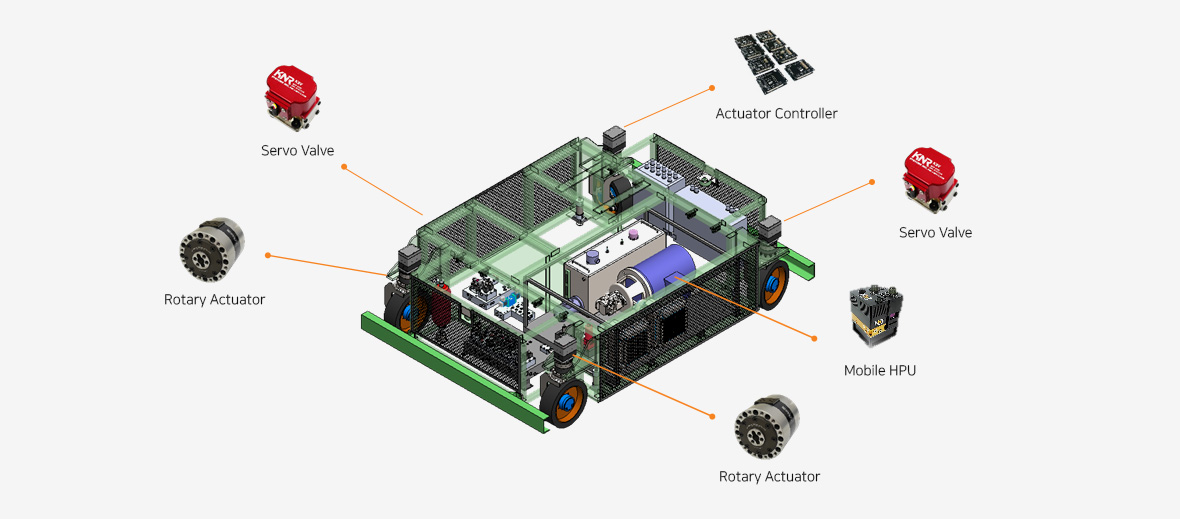
- 구동방식 : 4WIS(개별 구동 방식)
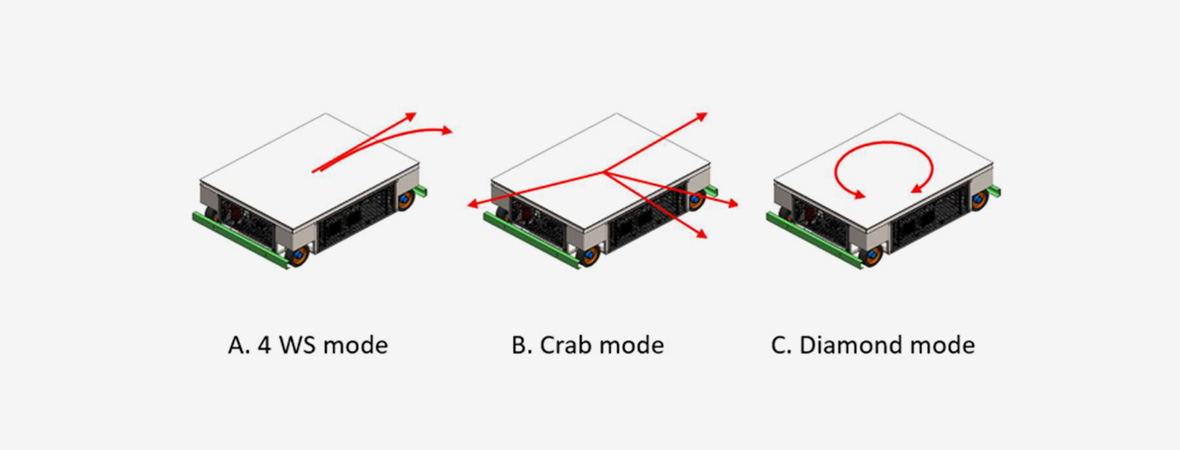
- 4WS mode : 4개 휠에 대한 독립적인 조향 제어가 가능하여 차량의 회전 곡률 반경과 곡률 중심점 위치를 자유롭게 조정할 수 있어
장애물 회피 및 목표지점 경로의 자유로운 주행이 가능 - Crab mode : 회전 주행 뿐 아니라 바퀴를 다양한 각도의 평행한 위치로 정렬하여, 대각선 주행, 수평 주행 등의 다양한 Omni-direction 조향이 가능하여 자유로운 경로 주행이 가능
- Diamond mode : 바퀴를 diamond 형태로 배치하여 제자리 회전(선회)이 가능